AGVŻ©Automated Guided VehicleŻ®ąĪ▄ć(ch©ź)ū„×ķ─┐Ū░╣żśI(y©©)ūįäė(d©░ng)╗»ŽĄĮy(t©»ng)ųąųžę¬Ą─ĮM│╔▓┐ĘųŻ¼į┌╣żÅS║═ÅSĘ┐Ą─╬’┴„š{(di©żo)Č╚ŽĄĮy(t©»ng)ųąŲų°ųžę¬ū„ė├[1]Ż¼ėąų°ĘŪ│ŻÅVĘ║Ą─æ¬(y©®ng)ė├Ū░Š░ĪŻ
é„Įy(t©»ng)Ą─AGVąĪ▄ć(ch©ź)┐žųŲęįĮø(j©®ng)ĄõĄ─PID┐žųŲ×ķų„Ż¼Ą½PID┐žųŲĄ─Š½┤_│╠Č╚╚ĪøQė┌ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═Ą─Š½┤_│╠Č╚╝░ģóöĄ(sh©┤)įO(sh©©)ų├ĀŅør[2]ĪŻAGVąĪ▄ć(ch©ź)į┌╣żÅS╝░ÅSĘ┐ųąĄ─╣żū„Łh(hu©ón)Š│Å═(f©┤)ļsŻ¼Ūęį┌ąą±é▀^(gu©░)│╠ųąĢ■(hu©¼)╩▄ĄĮĖ„ĘN╣żørĄ─Ė╔ö_Ż¼é„Įy(t©»ng)Ą─ PID ┐žųŲėąĢr(sh©¬)║▄ļy▀_(d©ó)ĄĮļyęįą¦╣¹[3]ĪŻ
╗∙ė┌┤╦Ż¼Ęų╬÷┴╦─Ż║²┐žųŲÖC(j©®)└ĒŻ¼ßśī”(du©¼) AGV ųąų▒┴„ļŖÖC(j©®)Ą─š{(di©żo)╦┘ŽĄĮy(t©»ng)Ż¼▓╔ė├─Ż║² PID ▀M(j©¼n)ąą┐žųŲŻ¼śO┤¾Ąž╠ßĖ▀┴╦ųŪ─▄ąĪ▄ć(ch©ź)▐D(zhu©Żn)╦┘┐žųŲĄ─£╩(zh©│n)┤_ąįĪóĘĆ(w©¦n)Č©ąį╝░Ę┤æ¬(y©®ng)╦┘Č╚ĪŻ
1 AGVŽĄĮy(t©»ng)śŗ(g©░u)│╔
AGV ŽĄĮy(t©»ng)čbéõ┴╦┤┼ī¦(d©Żo)║ĮĪóCCD ī¦(d©Żo)║ĮĪó╝ż╣Ōī¦(d©Żo)║ĮĄ╚[4]Ż¼╩╣Ą├ AGV į┌ąą±é▀^(gu©░)│╠ųą─▄ē“░┤šš╩┬Ž╚ęÄ(gu©®)äØĄ─┬ĘÅĮ▀\(y©┤n)ąąŻ¼▓┘ū„š▀ų╗ąĶĖ∙ō■(j©┤)╔Ž╬╗ÖC(j©®)▀M(j©¼n)ąą¼F(xi©żn)ł÷(ch©Żng)Ą─īŹ(sh©¬)Ģr(sh©¬)š{(di©żo)Č╚Ż¼ī”(du©¼)ė┌▓╗═¼Ą─¼F(xi©żn)ł÷(ch©Żng)▀\(y©┤n)ąąŪķør AGV ▀M(j©¼n)ąąīŹ(sh©¬)Ģr(sh©¬)Ą─¼F(xi©żn)ł÷(ch©Żng)š{(di©żo)Č╚Ż¼ę“┤╦Ż¼┤¾┤¾ĮĄĄ═┴╦ī”(du©¼)ė┌╚╦┴”Ą─ę└┘ć(l©żi)Ż¼╠ßĖ▀┴╦╣żū„ą¦┬╩║═░▓╚½ŽĄöĄ(sh©┤)ĪŻ
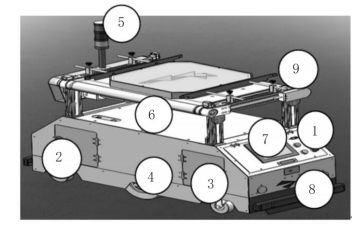
AGVŽĄĮy(t©»ng)═©▀^(gu©░)┘Nį┌Ąž├µ╔ŽĄ─┤┼ī¦(d©Żo)║Įé„ĖąŲ„▀M(j©¼n)ąąī¦(d©Żo)║ĮŻ¼īŹ(sh©¬)Ģr(sh©¬)▒O(ji©Īn)┐žAGVąĪ▄ć(ch©ź)¼F(xi©żn)ł÷(ch©Żng)╬╗ų├Ż¼¼F(xi©żn)ł÷(ch©Żng)š{(di©żo)Č╚Ż¼▒▄├ŌAGVų«ķg░l(f©Ī)╔·┼÷ū▓ĪŻAGVĄ─╣®ļŖŽĄĮy(t©»ng)ė╔ļŖ│ž╠ß╣®Ż¼ā╔ēKļŖ│ž░▓čbį┌AGVĄ─ā╔Č╦Ż©ę╗░Ń×ķī”(du©¼)ĘQ(ch©źng)░▓čbŻ®Ż¼┤┼Ėąæ¬(y©®ng)é„ĖąŲ„░▓čbį┌ AGV Ą─ā╔Č╦Ż¼«a(ch©Żn)╔·ę╗éĆ(g©©)ķ]Łh(hu©ón)Ą─ŽĄĮy(t©»ng)üĒ(l©ói)▀M(j©¼n)ąąąĪ▄ć(ch©ź)Ą─īŹ(sh©¬)ļH╬╗ų├Ą─¼F(xi©żn)ł÷(ch©Żng)š{(di©żo)╣Ø(ji©”)[5]ĪŻAGV┤¾ąĪėą║▄ČÓĘNĘųŅÉ(l©©i)Ż¼ī”(du©¼)ė┌┤¾ą═ AGVĄ─š{(di©żo)Č╚ąĶę¬┐╝æ]Ųõ░▓╚½ĘČć·╩ŪʱūŃē“Ż¼▐D(zhu©Żn)ÅØĢr(sh©¬)╩ŪʱØM(m©Żn)ūŃ¼F(xi©żn)ł÷(ch©Żng)ę¬Ū¾ĪŻAGVŽĄĮy(t©»ng)┴Ń╝■łD╚ńłD 1 ╦∙╩ŠŻ¼Ųõųąó┘åóäė(d©░ng)Īó═Żų╣ĪóÅ═(f©┤)╬╗Īó╝▒═Ż░┤ŌoŻ╗ó┌║═ó█Š∙×ķ 12 V ļŖ│žŻ╗ó▄▌åūėŻ╗ó▌╚²╔½¤¶Ż╗ó▐é„╦═ĦŻ╗ó▀ė|├■Ų┴Ż╗óÓ▒▄šŽé„ĖąŲ„Ż╗óßī”(du©¼)╔õé„ĖąŲ„ĪŻAGV╦┼Ę■░▓čb╚ńłD2╦∙╩ŠŻ¼ŲõųąŻ¼ó┘×ķŪ░┤┼ī¦(d©Żo)║Įé„ĖąŲ„Ż╗ó┌×ķ║¾┤┼ī¦(d©Żo)║Įé„ĖąŲ„Ż╗ó█×ķ╦┼Ę■ļŖÖC(j©®)Ż╗ó▄×ķ╦┼Ę■“ī(q©▒)äė(d©░ng)Ų„ĪŻ

łD1 AGVŽĄĮy(t©»ng)┴Ń╝■łD

łD2 AGV╦┼Ę■░▓čbłD
2 AGVŽĄĮy(t©»ng)─Ż║²PID┐žųŲįO(sh©©)ėŗ(j©¼)
2.1 AGV▐D(zhu©Żn)╦┘┐žųŲ▓▀┬į
╗∙ė┌─Ż║²PIDĄ─AGV▐D(zhu©Żn)╦┘┐žųŲ╚ńłD 3 ╦∙╩Š[6]ĪŻ
“ī(q©▒)äė(d©░ng)┐žųŲŲ„┐žųŲ╝t═Ōé„ĖąŲ„╣żū„Ż¼Ė∙ō■(j©┤)╩š╝»ĄĮĄ─┬ĘørčŁ█Eą┼ŽóĄ├ĄĮąĪ▄ć(ch©ź)Ą─╦┘Č╚ĮoČ©ųĄŻ¼═¼Ģr(sh©¬)Ż¼▄ć(ch©ź)▌å╦┘Č╚Öz£y(c©©)─ŻēKÖz£y(c©©)ąĪ▄ć(ch©ź)╦┘Č╚Ż¼▀M(j©¼n)ąąĖ¶ļxĪóĘ┼┤¾ĪóA/D ▐D(zhu©Żn)ōQ║¾┼cĮoČ©╦┘Č╚▀M(j©¼n)ąą▒╚▌^Ż¼╚¶╣żÅSĄ─╬’┴„š{(di©żo)Č╚┬ĘÅĮėą╔ŽąąĪóŽ┬ąą╗“▐D(zhu©Żn)ÅØĀŅørŻ¼╦┘Č╚Öz£y(c©©)─ŻēK╝┤Ģ■(hu©¼)▒Ē¼F(xi©żn)│÷╔Ž╔²╗“Ž┬ĮĄ¼F(xi©żn)Ž¾Ż¼īó┤╦Ų½▓Ņą┼╠¢(h©żo)╦═Įo─Ż║² PID ┐žųŲŲ„Ż¼┐žųŲŲ„▀M(j©¼n)ąą─Ż║²ęÄ(gu©®)ätĄ─▀xō±Ż¼▌ö│÷Š½┤_Ą─╦┘Č╚├}ø_ą┼╠¢(h©żo)╦═╚ļļŖ┴”ļŖūėł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)Ż¼“ī(q©▒)äė(d©░ng)ų▒┴„ļŖÖC(j©®)Š½┤_Ą─░┤ššīŹ(sh©¬)ļH┬ĘørčŁ█E╦┘Č╚▀\(y©┤n)ąąĪŻ

łD3 AGV▐D(zhu©Żn)╦┘┐žųŲ┐“łD
2.2 AGV▐D(zhu©Żn)╦┘─Ż║²PID┐žųŲŲ„įO(sh©©)ėŗ(j©¼)
─Ż║² PID ┐žųŲŲ„ĮY(ji©”)śŗ(g©░u)╚ńłD 4╦∙╩ŠŻ¼ų„ę¬Ęų×ķā╔éĆ(g©©)─ŻēKŻ¼Ųõę╗╩Ūé„Įy(t©»ng)Ą─ PID ┐žųŲŲ„Ż¼ŲõČ■╩Ū─Ż║²┐žųŲŲ„Ż¼─Ż║²┐žųŲŲ„üĒ(l©ói)īŹ(sh©¬)¼F(xi©żn) PID ┐žųŲŲ„ģóöĄ(sh©┤)Ą─¼F(xi©żn)ł÷(ch©Żng)┤_Č©Ż¼╩╣Ą├ PID┐žųŲą¦╣¹Ė³╝ė└ĒŽļ╗»Ż¼─Ż║²PID┐žųŲŲ„ų„ę¬╩ŪīŹ(sh©¬)¼F(xi©żn)PID╚²┤¾ģóöĄ(sh©┤)║═š`▓ŅeĄ─ūā╗»┬╩Ī„eų«ķgĄ─ĻP(gu©Īn)ŽĄŻ¼į┌▀\(y©┤n)ąą▀^(gu©░)│╠ųąĖ∙ō■(j©┤)š`▓Ņ║═š`▓ŅĄ─ūā╗»┬╩▓╗öÓ┼ąöÓĪóėŗ(j©¼)╦ŃūŅĮKĄ─▒╚└²ĪóĘeĘųĪó╬óĘųģóöĄ(sh©┤)[7]ĪŻ

łD4 ─Ż║²PID┐žųŲĮY(ji©”)śŗ(g©░u)łD
╗∙ė┌╔Ž╩÷ĮY(ji©”)śŗ(g©░u)Ż¼AGV▐D(zhu©Żn)╦┘┐žųŲ─Ż║²PIDįO(sh©©)ėŗ(j©¼)┐╔Ęų×ķęįŽ┬ 4éĆ(g©©)▓Į¾E[8-9]ĪŻ
Ą┌ę╗▓ĮŻ¼ŽĄĮy(t©»ng)▌ö╚ļ▌ö│÷ą┼╠¢(h©żo)Ą─┤_Č©ĪŻAGVąĪ▄ć(ch©ź)öĄ(sh©┤)ō■(j©┤)▓╔śė╩Ū═©▀^(gu©░)┤┼ī¦(d©Żo)║Įé„ĖąŲ„Ą─16╬╗öĄ(sh©┤)ūų▓╔śė³c(di©Żn)Ż¼ęįI/O▌ö╚ļĄ──Ż╩Į▀M(j©¼n)ąąŻ¼═©▀^(gu©░)Ęų╬÷▌ö╚ļą┼╠¢(h©żo)Ą─▓╗═¼üĒ(l©ói)┤_Č©AGVąĪ▄ć(ch©ź)īŹ(sh©¬)ļH╦∙╠ÄĄ─╬╗ų├[10]Ż¼┤┼ī¦(d©Żo)║Į×ķ 16┬Ę 16³c(di©Żn)öĄ(sh©┤)ūų┴┐▌ö│÷Ż¼ę╗░Ńš²│ŻÖz▓ķĄĮĄ─ą┼╠¢(h©żo)×ķ 5┬Ę 5³c(di©Żn)öĄ(sh©┤)ūų┴┐▌ö│÷Ż¼└ĒšōĘų×ķŽ┬├µ 20ĘNŪķørŻ║
1000000000000000Ż©1Ż®
1100000000000000Ż©2Ż®
1110000000000000Ż©3Ż®
1111000000000000Ż©4Ż®
1111100000000000Ż©5Ż®
0111110000000000Ż©6Ż®
0011111000000000Ż©7Ż®
0001111100000000Ż©8Ż®
0000111110000000Ż©9Ż®
0000011111000000Ż©10Ż®
0000001111100000Ż©11Ż®
0000000111110000Ż©12Ż®
0000000011111000Ż©13Ż®
0000000001111100Ż©14Ż®
0000000000111110Ż©15Ż®
0000000000011111Ż©16Ż®
0000000000001111Ż©17Ż®
0000000000000111Ż©18Ż®
0000000000000011Ż©19Ż®
0000000000000001Ż©20Ż®
╚Īų▒┴„ļŖÖC(j©®)ĮŪ╦┘Č╚š`▓Ņ e ║═š`▓Ņūā╗»┬╩ ec ×ķŽĄĮy(t©»ng)▌ö╚ļūā┴┐Ż¼”żKpĪó”żKiĪó”żKd×ķ▌ö│÷ūā┴┐ĪŻīóš`▓Ņ e ┼cš`▓Ņūā╗»┬╩ ecĄ──Ż║²╗∙▒Ššōė“╚Ī×ķ[-6Ż¼6]ĪŻ
═©▀^(gu©░)▒╚└²Īó┴┐╗»ę“ūėė│╔õĄĮšōė“Ż║įO(sh©©)┤┼ī¦(d©Żo)║Įé„ĖąŲ„Ą─ 16┬Ę▌ö│÷ę└┤╬Å─ū¾ĄĮėę×ķŻ©1Ż®Ī·-6Ż¼Ż©2Ż®Ī·-5Ż¼Ż©3Ż®Ż©4Ż®Ī·-4Ż¼Ż©5Ż®Ż©6Ż®Ī·-3Ż¼Ż©7Ż®Ī·-2Ż¼Ż©8Ż®Ż©9Ż®Ī·-1Ż¼Ż©10Ż®Ż©11Ż®Ī·0Ż¼Ż©12Ż®Ż©13Ż®Ī·1Ż¼Ż©14Ż®Ī·2Ż¼Ż©15Ż®Ż©16Ż®Ī·3Ż¼Ż©17Ż®Ż©18Ż®Ī·4Ż¼Ż©19Ż®Ż©20Ż®Ī·5
Ą┌Č■▓ĮŻ¼ŽĄĮy(t©»ng)▌ö╚ļ▌ö│÷ūā┴┐─Ż║²╗»ĪŻ
įO(sh©©)ėŗ(j©¼)ųąīóeĪóecĪó”żKpĪó”żKiĪó”żKdĄ─┴┐╗»Ą╚╝ē(j©¬)Š∙įO(sh©©)×ķ13╝ē(j©¬)Ż¼╝┤2éĆ(g©©)▌ö╚ļūā┴┐ę╗éĆ(g©©)▌ö│÷ūā┴┐į┌─Ż║²╝»╔ŽĄ─šōė“?y©żn)ķŻ║{-6Ż¼-5Ż¼-4Ż¼-3Ż¼-2Ż¼-1Ż¼0Ż¼+1Ż¼+2Ż¼+3Ż¼+4Ż¼+5Ż¼+6}ĪŻī”(du©¼)æ¬(y©®ng)Ą──Ż║²šZ(y©│)čį×ķ{NBŻ¼NMŻ¼NSŻ¼ZOŻ¼PSŻ¼PMŻ¼PB}Ż¼įō╝»║Žųąį¬╦žĘųäe┤·▒Ēžō(f©┤)┤¾Īóžō(f©┤)ųąĪóžō(f©┤)ąĪĪó┴ŃĪóš²ąĪĪóš²ųąĪóš²┤¾[11-12]ĪŻ░č╔Ž╩÷╝»║ŽĄ─į¬╦ž├Ķ╩÷×ķAGV ąĪ▄ć(ch©ź)Ą─╝ėĪó£p╦┘ĀŅørŻ¼ät×ķŻ║NB ▒Ē╩Š┤¾£p╦┘ĪóNM▒Ē╩Šųą£p╦┘ĪóNS▒Ē╩ŠąĪ£p╦┘ĪóZO ▒Ē╩Š▒Ż│ų«ö(d©Īng)Ū░▐D(zhu©Żn)╦┘ĪóPS ▒Ē╩ŠąĪ╝ė╦┘ĪóPM ▒Ē╩Šųą╝ė╦┘ĪóPB ▒Ē╩Š┤¾╝ė╦┘ĪŻ┐╝æ]ĄĮ AGV ąĪ▄ć(ch©ź)į┌īŹ(sh©¬)ļH▀\(y©┤n)ąąųą«a(ch©Żn)╔·Ą─š`▓Ņ╩ŪļSÖC(j©®)Ą─Ż¼ę“┤╦Ż¼▓╔ė├╚²ĮŪą╬ļ`ī┘║»öĄ(sh©┤)Ż¼╚ńłD 5╦∙╩ŠĪŻ

łD5 ╚²ĮŪą╬ļ`ī┘║»öĄ(sh©┤)łD
Ą┌╚²▓Į ─Ż║²ęÄ(gu©®)ätÄņ(k©┤)Ą─Į©┴óĪŻ
─Ż║²ęÄ(gu©®)ätÄņ(k©┤)Ą─Į©┴ó╝┤×ķšę│÷▀\(y©┤n)ąąĢr(sh©¬)┐╠PĪóIĪóD┼cš`▓Ņe╝░š`▓Ņūā╗»┬╩ecų«ķgĄ──Ż║²ĻP(gu©Īn)ŽĄĪŻ═©▀^(gu©░)e║═ecĄ─ūā╗»ęÄ(gu©®)┬╔Ż¼æ¬(y©®ng)ė├╦∙ųŲČ©Ą──Ż║²┐žųŲęÄ(gu©®)ätŻ¼Å─Č°š{(di©żo)š¹”żKpĪó”żKiĪó”żKd╚²éĆ(g©©)ģóöĄ(sh©┤)ųĄŻ¼╩╣AGVąĪ▄ć(ch©ź)į┌▀\(y©┤n)ąą▀^(gu©░)│╠ųąėą┴╝║├Ą─äė(d©░ng)æB(t©żi)ąį╝░ĘĆ(w©¦n)Č©ąį[13-14]ĪŻæ¬(y©®ng)ė├į┌ųŪ─▄ąĪ▄ć(ch©ź)ųąŻ¼ī”(du©¼)╦┘Č╚š`▓ŅeĄ─┐žųŲęÄ(gu©®)┬╔ė╚×ķųžę¬Ż¼▓╗║Ž▀mĄ─┐žųŲęÄ(gu©®)┬╔Ģ■(hu©¼)╩╣AGVĄ─╦┘Č╚«a(ch©Żn)╔·š±╩ÄŻ¼ī”(du©¼)▓╗═¼▄ć(ch©ź)ķgĄ─▓╗═¼┬ĘÅĮ?j©®ng)]ėą║▄║├Ą─▀mæ¬(y©®ng)ąįĪŻ«ö(d©Īng)▄ć(ch©ź)¾wīŹ(sh©¬)ļH▀\(y©┤n)ąą╦┘Č╚║═Ų┌═¹╦┘Č╚Ų½▓Ņe┤¾Ģr(sh©¬)Ż¼×ķ┴╦╝ė╦┘ŽĄĮy(t©»ng)Ą─Ė·█Ö╦┘Č╚Ż¼æ¬(y©®ng)╚Ī▌^┤¾Ą─KpŻ╗Ą½╩Ū×ķ┴╦▒▄├Ōė╔ė┌ķ_(k©Īi)╩╝Ģr(sh©¬)Ų½▓ŅeĄ─╦▓ķgūā┤¾┐╔─▄│÷¼F(xi©żn)Ą─╬óĘų▀^(gu©░)’¢║═Č°╩╣┐žųŲū„ė├│¼│÷įS┐╔ĘČć·Ż¼æ¬(y©®ng)╚Ī▌^ąĪĄ─KdŻ¼═¼Ģr(sh©¬)×ķ┴╦Ę└ų╣ŽĄĮy(t©»ng)╦┘Č╚Ēææ¬(y©®ng)│÷¼F(xi©żn)▌^┤¾Ą─│¼š{(di©żo)Ż¼«a(ch©Żn)╔·ĘeĘų’¢║═Ż¼æ¬(y©®ng)ī”(du©¼)ĘeĘųū„ė├╝ėęįŽ▐ųŲŻ¼═©│Ż╚ĪKi=0Ą╚ĪŻĖ∙ō■(j©┤)AGVĄ─▓┘ū„Įø(j©®ng)“×(y©żn)Ż¼┐╔Ą├▐D(zhu©Żn)╦┘┐žųŲ▌ö│÷ģóöĄ(sh©┤)Ż©”żKpĪó”żKiĪó”żKdŻ®Ą──Ż║²ęÄ(gu©®)ätÄņ(k©┤)╚ń▒Ē 1╦∙╩Š[15-17]ĪŻ

▒Ē1 ”żKpĪó”żKiĪó”żKd─Ż║²┐žųŲęÄ(gu©®)┬╔
─Ż║²┐žųŲŲ„▌ö│÷┴┐╩Ū─Ż║²┴┐Ż¼▓╗─▄ų▒Įėė├üĒ(l©ói)┐žųŲų▒┴„ļŖÖC(j©®)Ą─▐D(zhu©Żn)╦┘Ż¼į┌AGVīŹ(sh©¬)ļH┐žųŲĢr(sh©¬)ę¬īó▀@ą®ĮY(ji©”)╣¹▐D(zhu©Żn)╗»×ķŠ½┤_┴┐ĪŻ┐╝æ]ĄĮųžą─Ę©─▄▌^║├Ą─Ę┤ė│┐žųŲ┴┐Ą─šµīŹ(sh©¬)Ęų▓╝ŪķørŻ¼ę“┤╦Ż¼į┌▒ŠįO(sh©©)ėŗ(j©¼)ųą▓╔ė├ųžą─Ę©ī”(du©¼)─Ż║²ūā┴┐▀M(j©¼n)ąą▐D(zhu©Żn)╗»ĪŻ
3 īŹ(sh©¬)“×(y©żn)ī”(du©¼)▒╚Ęų╬÷
╬─ųą▓╔ė├AB PLCū„×ķ┐žųŲįO(sh©©)éõŻ¼ė├╠▌ą╬łDī”(du©¼)PID┐žųŲŲ„║═─Ż║²┐žųŲŲ„▀M(j©¼n)ąąįO(sh©©)ėŗ(j©¼)Ż¼×ķ┴╦┐╔ęį┐ņ╦┘Ēææ¬(y©®ng)AGVąĪ▄ć(ch©ź)Ą─īŹ(sh©¬)ļH╬╗ų├Ż¼▓╔śėĢr(sh©¬)ķgįO(sh©©)×ķ100mmsĪŻļŖ┬Ę║═ÜŌ┬Ę▀BĮė═Ļ│╔▓óÖz▓ķ¤o(w©▓)š`║¾Ż¼═©ļŖŽ┬▌d│╠ą“▓óį┌ŠĆ▒O(ji©Īn)┐ž│╠ą“▀\(y©┤n)ąąĪŻ▀BĮė┬Ęė╔Ų„Ż¼▀M(j©¼n)ąą AB PLC Ą─ IPįO(sh©©)ų├ĪŻŠ▀¾wĄ─š{(di©żo)įć▀^(gu©░)│╠╚ńŽ┬Ż║
1Ż®į┌ų„▓╦å╬«ŗ(hu©ż)├µųą LCD Ą─╩╣ė├µI▒P(p©ón)╔ŽĄ─ Up ║═DownµI▀x Advanced SetĪŻ
2Ż®═©▀^(gu©░)³c(di©Żn)ō¶ LCD µI▒P(p©ón)╔ŽĄ─ OK µI╝┤┐╔│÷¼F(xi©żn)Ė▀╝ē(j©¬)įO(sh©©)ų├▓┘ū„Įń├µŻ¼╚ńłD 6 ╦∙╩ŠĪŻįōĮń├µ╔ŽėąĪ░UpĪ▒║═Ī░DownĪ▒╔ŽĪóŽ┬ĘŁ▐D(zhu©Żn)µIė├üĒ(l©ói)▀xō± ENET ╣”─▄Ż¼▀xō±║├ų«║¾³c(di©Żn)ō¶ OK µI╝┤┐╔▀M(j©¼n)╚ļĪŻ
3Ż®╩╣ė├Ī░UpĪ▒║═Ī░DownĪ▒╔ŽĪóŽ┬ĘŁ▐D(zhu©Żn)µIī”(du©¼) IP ĄžųĘ▀M(j©¼n)ąąįO(sh©©)ų├Ż¼įO(sh©©)ų├║├Ą─ IPĄžųĘ³c(di©Żn)ō¶ OK µI╝┤┐╔ĪŻ

łD6 PIDģóöĄ(sh©┤)│╠ą“š{(di©żo)įćĮń├µłD
4Ż®▌ö╚ļ├▄┤a▓┘ū„Įń├µŻ¼į┌▒Š AGV ąĪ▄ć(ch©ź)┐žųŲŽĄĮy(t©»ng)ųą Ż¼═© ▀^(gu©░) LeftĪóRightĪóUp ║═ Down µIīŹ(sh©¬)¼F(xi©żn)Master passwordĄ─įO(sh©©)ų├Ż¼įō├▄┤aūŅ┤¾ķL(zh©Żng)Č╚×ķ10╬╗öĄ(sh©┤)ūųŻ¼į┌▒Š▓┘ū„ŽĄĮy(t©»ng)ųąŻ¼įO(sh©©)ų├ 1234×ķ Master passwordĪŻ
5Ż®├▄┤a“×(y©żn)ūCĮń├µŻ¼╚¶▌ö╚ļĄ─├▄┤aš²┤_Ż¼ät’@╩Šęį╠½ŠW(w©Żng)ŠW(w©Żng)Įj(lu©░)ŅÉ(l©©i)ą═▀xō±Įń├µŻ¼³c(di©Żn)ō¶Ī░UpĪ▒║═Ī░DownĪ▒╔ŽĪóŽ┬ĘŁ▐D(zhu©Żn)µI▀xō±║Ž▀mĄ─ŠW(w©Żng)Įj(lu©░)ŅÉ(l©©i)ą═Ż╗╚¶▌ö╚ļ├▄┤a▓╗š²┤_Ż¼ät▓┘ū„Įń├µĢ■(hu©¼)╠ß╩Š├▄┤aėąš`Ą─Õe(cu©░)š`ą┼ŽóĪŻ
6Ż®ī”(du©¼)ŠW(w©Żng)Įj(lu©░)Ą─IPĄžųĘęį╝░ūėŠW(w©Żng)č┌┤aĄ╚ą┼Žó▀M(j©¼n)ąąįO(sh©©)ų├ĪŻš{(di©żo)įć▀^(gu©░)│╠═Ļ│╔║¾Ż¼łD 7 ║═łD 8 Ęųäe’@╩Š┴╦é„Įy(t©»ng)PID ║═▒ŠįO(sh©©)ėŗ(j©¼)Ą──Ż║² PID īŹ(sh©¬)¼F(xi©żn)ĮY(ji©”)╣¹ĪŻ┐╔ęį┐┤│÷Ż¼─Ż║²PID ┐žųŲėą▌^Č╠Ą─Ēææ¬(y©®ng)Ģr(sh©¬)ķgŻ¼▌^ąĪĄ─│¼š{(di©żo)Ż¼─▄▌^┐ņ▀M(j©¼n)╚ļĘĆ(w©¦n)æB(t©żi)Ż¼ę“┤╦Ż¼─▄Ė³║├Ą─Ė·█Ö AGV ąĪ▄ć(ch©ź)╦┘╦┘┐žųŲĪŻ

łD7 PIDĒææ¬(y©®ng)łD
łD8 ─Ż║²PIDĒææ¬(y©®ng)łD
4 ĮY(ji©”) šō
╬─ųąĮķĮB┴╦AGVąĪ▄ć(ch©ź)Ą─śŗ(g©░u)│╔Ż¼į┌┤╦╗∙ĄA(ch©│)╔ŽŻ¼ßśī”(du©¼)ąĪ▄ć(ch©ź)Ą─▐D(zhu©Żn)╦┘┐žųŲŽĄĮy(t©»ng)Ż¼įO(sh©©)ėŗ(j©¼)┴╦▐D(zhu©Żn)╦┘─Ż║²PID┐žųŲŲ„Ż¼▓óį┌PLCįO(sh©©)éõ╔Ž▀M(j©¼n)ąą┴╦īŹ(sh©¬)ļH“×(y©żn)ūCŻ¼┼cé„Įy(t©»ng)PID┐žųŲŽÓ▒╚Ż¼AGV─Ż║² PID ▐D(zhu©Żn)╦┘┐žųŲŲ„Ēææ¬(y©®ng)Ģr(sh©¬)ķgČ╠Ż¼Ēææ¬(y©®ng)▀^(gu©░)│╠¤o(w©▓)š±╩Ĥo(w©▓)│¼š{(di©żo)Ż¼ėą▌^║├Ą─äė(d©░ng)ĪóĘĆ(w©¦n)æB(t©żi)ąį─▄ĪŻ
ģó┐╝╬─½I(xi©żn)Ż║
[1] į°ņ┼. ╗∙ė┌─Ż║²┐žųŲĄ─┤┼ę²ī¦(d©Żo)AGVŽĄĮy(t©»ng)┬ĘÅĮąŻš²Ą─æ¬(y©®ng)ė├蹊┐[D]. ║╝ų▌Ż║║╝ų▌ļŖūė┐Ų╝╝┤¾īW(xu©”)Ż¼2015.
[2] Mendes JŻ¼Araujo RŻ¼Matias TŻ¼et al. Automatic extraction of the fuzzy control system by a hierar⁃ chical genetic algorithm[J]. Engineering Applica⁃ tions of Artificial IntelligenceŻ¼2014Ż¼29Ż©3Ż®Ż║70-78.
[3] Baturone IŻ¼Moreno-Velo FJŻ¼Śnchez-Solano SŻ¼et al. Automatic design of fuzzy controllers for carlike autonomous robots[J]. IEEE Transactions on Fuzzy SystemsŻ¼2004Ż¼12Ż©4Ż®Ż║447-465.
[4] ╦╬īW(xu©”)┘tŻ¼šä║Ļ╚AŻ¼┼╦š²┤║Ż¼Ą╚. ╗∙ė┌ūį▀mæ¬(y©®ng)─Ż║²PIDĄ─AGVĖ▀Š½Č╚īż█EŽĄĮy(t©»ng)Ą─蹊┐[J]. ć°(gu©«)ā╚(n©©i)═ŌÖC(j©®)ļŖę╗¾w╗»╝╝ąg(sh©┤)Ż¼2012Ż©1Ż®Ż║29-31.
[5] ╬õąŪŻ¼śŪ┼Õ╗═Ż¼╠ŲČž▒°. ūįäė(d©░ng)ī¦(d©Żo)ę²▄ć(ch©ź)┬ĘÅĮĖ·█Ö║═╦┼Ę■┐žųŲĄ─╗ņ║Ž▀\(y©┤n)äė(d©░ng)┐žųŲ[J]. ÖC(j©®)ąĄ╣ż│╠īW(xu©”)ł¾(b©żo)Ż¼2011Ż¼47Ż©3Ż®Ż║43-48.
[6] ╚~Į÷╬. ╗∙ė┌─Ż║² PID Ą─ųŪ─▄ąĪ▄ć(ch©ź)┐žųŲ╦Ńʩ蹊┐[J]. īŹ(sh©¬)“×(y©żn)┐ŲīW(xu©”)┼c╝╝ąg(sh©┤)Ż¼2016Ż¼14Ż©1Ż®Ż║46-47.
[7] ═§╩÷Å®Ż¼Ä¤ėŅŻ¼±TųęŠw. ╗∙ė┌─Ż║² PID ┐žųŲŲ„Ą─┐žųŲĘĮʩ蹊┐[J]. ÖC(j©®)ąĄ┐ŲīW(xu©”)┼c╝╝ąg(sh©┤)Ż¼2011Ż¼30Ż©1Ż®Ż║166-172.
[8] ³SėčõJŻ¼Ū·┴óć°(gu©«).PID ┐žųŲŲ„ģóöĄ(sh©┤)š¹Č©┼cīŹ(sh©¬)¼F(xi©żn)Ż█MŻ▌.
[9] £½╝tš\(ch©”ng)Ż¼└Ņų°ą┼Ż¼═§š²Ø²Ż¼Ą╚. ę╗ĘN─Ż║²PID┐žųŲŽĄĮy(t©»ng)[J]. ļŖÖC(j©®)┼c┐žųŲīW(xu©”)ł¾(b©żo)Ż¼2005Ż¼9Ż©2Ż®Ż║136-138.
[10]╝o(j©¼)üåĘ╝Ż¼ÅłųŠäé. ╗∙ė┌─Ż║² PID Ą─ļp╚▌╦«Žõę║╬╗┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)[J]. ╔Į╬„ĤĘČ┤¾īW(xu©”)īW(xu©”)ł¾(b©żo)Ż©ūį╚╗┐ŲīW(xu©”)░µŻ®Ż¼2019Ż¼33Ż©2Ż®Ż║37-40.
[11]└Ņčį├±Ż¼├ńą└Ż¼Į¬ĖČĮ▄Ż¼Ą╚. ╗∙ė┌─Ż║²PID ┐žųŲŲ„Ą─ČÓļŖÖC(j©®)Į╗▓µ±Ņ║Ž┐žųŲ═¼▓Į┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)[J]. ļŖ╣ż╝╝ąg(sh©┤)Ż¼2005Ż©3Ż®Ż║118-120.
[12]═§Į©╝tŻ¼ĻÉę½ųęŻ¼ĻÉ╣Ż¼Ą╚. ╗∙ė┌Į╗▓µ±Ņ║Ž┐ž ųŲĄ─ļpļŖÖC(j©®)═¼▓Į┐žųŲŽĄĮy(t©»ng)蹊┐[J]. ─ŽŠ®└Ē╣ż┤¾īW(xu©”)īW(xu©”)ł¾(b©żo)Ż¼2017Ż¼41Ż©6Ż®Ż║693-697.
[13]ÅłąĪŠĻ. ╗∙ė┌AT89S51å╬Ų¼ÖC(j©®)Ą─│²č§Ų„£žČ╚┐žųŲŽĄĮy(t©»ng)Ą─įO(sh©©)ėŗ(j©¼)[J]. ╝Å┐ŚĖ▀ąŻ╗∙ĄA(ch©│)┐ŲīW(xu©”)īW(xu©”)ł¾(b©żo)Ż¼2010Ż©3Ż®: 372-376.
[14]ŠŽ╔²▌xŻ¼└ŅŚŅ├±. ĘŪ═Ļš¹╝s╩°ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦šōė“ūįš{(di©żo)š¹─Ż║²┐žųŲ蹊┐[J]. ļŖūėįO(sh©©)ėŗ(j©¼)╣ż│╠Ż¼2016Ż¼24Ż©5Ż®Ż║103-106.
[15]ąņÓŹ┴ųŻ¼ųņĮ©▓©Ż¼ÓŹéźĮ▄Ż¼Ą╚. ╗∙ė┌─Ż║²┐žųŲĄ─ļŖäė(d©░ng)Ų¹▄ć(ch©ź)│õļŖŲ„Ą─蹊┐[J]. ļŖūėįO(sh©©)ėŗ(j©¼)╣ż│╠Ż¼2017Ż¼25Ż©12Ż®Ż║85-88.
[16]═§Ķ┤Ż«ę╗ĘN╗∙ė┌─Ż║²┐žųŲĄ─ČÓé„ĖąŲ„╣▄└Ē╦ŃĘ©Ą─蹊┐[J]Ż«ļŖūėįO(sh©©)ėŗ(j©¼)╣ż│╠Ż¼2018Ż¼26Ż©21Ż®Ż║47-51.
[17]╠KōP(y©óng)Ż¼äó╬─čįŻ¼äó×tŻ¼Ą╚. ╗∙ė┌─Ż║²┐žųŲĄ─├ż╚╦▒▄šŽŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)[J]. ą┼ŽóŠW(w©Żng)Įj(lu©░)░▓╚½Ż¼2014Ż©6Ż®Ż║67-71.╬─š┬üĒ(l©ói)į┤ė┌AGV░╔
╚ń╣¹▐D(zhu©Żn)▌dŻ¼šł(q©½ng)ūó├„▒Š╬─ĄžųĘŻ║http://www.jianqi888.cn/jishu_14433013.html

║ŽÖC(j©®)Ų„╚╦")


")
